
Li Zhenyu (李振雨), Ph.D in Mechanical Engineering of Tongji University, jointed the Department of Robotics Engineering of Qilu University of Technology (Shandong Academy of Sciences) from Oct. 2023, and built the computer vision for robot automation laboratory (CV4RA lab.). He has published more than 30 papers in SCI journals and robotics academic conferences. He achieved the Best Paper Finalist Award at the “2019 IEEE ROBIO Conference” (Top 1.5%). He was awarded the “Outstanding Graduate of Tongji University” in 2023 (Top 2%). He currently serves as a reviewer for several TOP journals (i.e., IEEE-TII, IEEE-T-ITS, IEEE-RAL, …). His current research covers localization and navigation for intelligent unmanned systems (including robots, autonomous vehicles, UAVs, etc.).
📣 We welcome outstanding and self-motivating undergraduate students (second-year, third-year, and graduate students) to participate in subject competitions, and (sophomore students and above) to jointly carry out research on cutting-edge topics. We also welcome outstanding postgraduate students from both inside and outside the school to collaborate on AI & Robotic research.
Available Research Topics (for prospective students):
- Cross-domain adaptive visual place recognition for mobile robots
- Multi-modal Perception-based automatic navigation for intelligent vehicles
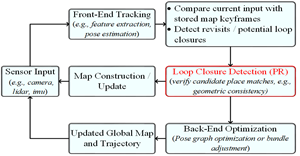
- Multi-Robot-Collaboration SLAM
- Heterogeneous multi-agent collaboration for visual place recognition
- Multi-UAVs visual perception with low-illumination environments
- Image quality analysis (fog, rain or snow removal technology)
Research Topics
- Robot Localization and Navigation
- Cross-modal Perception
- Intelligent Driving
- Edge Intelligent Computing
📤有志于在CV4RA从事学术研究和学科竞赛的优秀同学(特别欢迎打算出国深造和考研学生加入),欢迎联系我洽谈! Email(嗖~!🚀可达):lizhenyu@ieee.org.
News
- 2025.12:
 Our paper “Quadruplet-attention transformer for scale-invariant robot placerecognition” has been accepted by《Expert Systems With Applications》 ! well done👏👏👏!!!
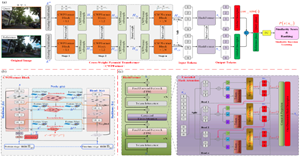
Our paper “Quadruplet-attention transformer for scale-invariant robot placerecognition” has been accepted by《Expert Systems With Applications》 ! well done👏👏👏!!! - 2025.11: Our paper “FourierPlace: A Vision-Language Localization Framework Based on Frequency Domain Representations” has been accepted by《IEEE Robotics and Automation Letters》 ! well done👏👏👏!!!
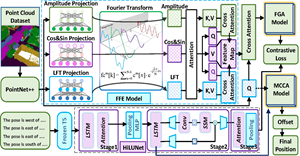
- 2025.06: Our paper “MambaPlace: Text-to-Point-Cloud Cross-Modal Place Recognition with Attention Mamba Mechanisms” has been accepted by《IROS-2025》 ! well done👏👏👏!!!
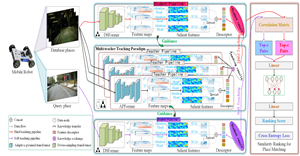
- 2025.06: Our paper “Bridging Text and Vision: A Multi-View Text-Vision Registration Approach for Cross-Modal Place Recognition” has been accepted by《IROS-2025》 ! well done👏👏👏!!!
- 2025.01: Our paper “CWPFormer: Towards High-performance Visual Place Recognition for Robot with Cross-weight Attention Learning” has been accepted by《IEEE Transactions on Artificial Intelligence》 ! well done👏👏👏!!!
- 2025.01: Our paper “Multi-Modal Attention Perception for Intelligent Vehicle Navigation using Deep Reinforcement Learning” has been accepted by《IEEE Transactions on Intelligent Transportation Systems》 ! well done👏👏👏!!!
Honors and Awards
- 2024.08 2024年省级大学生创新创业训练计划项目拟立项 (指导老师)
- 2024.06 2024年(第十届)全国大学生统计建模大赛山东赛区一等奖 (指导老师)
- 2019.12 Best Paper Finalist in 2019 IEEE-ROBIO conference
- 2019.10 Excellent Doctoral Scholarship in 2019 Tongji University
- 2023.06 Outstanding graduates in 2023 Tongji University
Publications
(2025 published papers)
Quadruplet-attention transformer for scale-invariant robot placerecognition, ESWA.
![]()
Zhenyu Li*, Pengjie Xu
FourierPlace: A Vision-Language Localization Framework Based on Frequency Domain Representations, IEEE-RAL.
![]()
Tianyi Shang, Zhenyu Li*, Shuaishuai Lu, Pengjie Xu
Place Recognition: A Comprehensive Review, Current Challenges and Future Directions, AI-Review.
![]()
Zhenyu Li*, Tianyi Shang, Pengjie Xu, Zhaojun Deng

Multi-Modal Attention Perception for Intelligent Vehicle Navigation using Deep Reinforcement Learning, IEEE Transactions on Intelligent Transportation Systems.
![]()
Zhenyu Li*, Tianyi Shang, Pengjie Xu
CWPFormer: Towards High-performance Visual Place Recognition for Robot with Cross-weight Attention Learning, IEEE Transactions on Artificial Intelligence.
![]()
Zhenyu Li*, Pengjie Xu, Tianyi Shang
Feature-Level Knowledge Distillation for Place Recognition based on Soft-Hard Labels Teaching Paradigm, IEEE Transactions on Intelligent Transportation Systems. (中科院1区top)
Zhenyu Li*, Pengjie Xu, Zhenbiao Dong, Ruirui Zhang, Zhaojun Deng
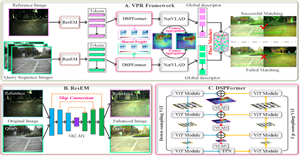
Towards Robust Visual Place Recognition for Mobile Robots with an End-to-end Dark-enhanced Net, IEEE Transactions on Industrial Informatics. (中科院1区top)
Zhenyu Li*, Tianyi Shang, Pengjie Xu, Zhaojun Deng, and Ruirui Zhang

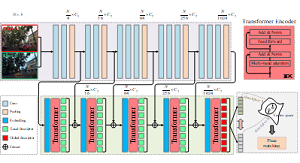
Pyramid transformer-based triplet hashing for robust visual place recognition, Computer Vision and Image Understanding. (CCF-B)
Zhenyu Li* and Pengjie Xu
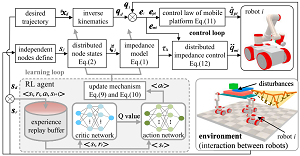
Reinforcement learning-based distributed impedance control of robots forcompliant operation in tight interaction tasks, Engineering Applications of Artificial Intelligence. (中科院1区top)
Pengjie Xu, Zhenyu Li, Xun Liu, Tianrui Zhao, Lin Zhang, Yanzheng Zhao
CSPFormer: A Cross-Spatial Pyramid Transformer for Visual Place Recognition, Neurocomputing. (中科院二区top, CCF-C)
Zhenyu Li*, Pengjie Xu
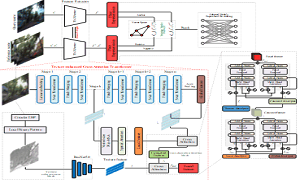
TECD_Attention: Texture-enhanced and cross-domain attention modeling for visual place recognition, Computer Vision and Image Understanding. (CCF-B)
Zhenyu Li*, Zhenbiao Dong