
Li Zhenyu, Ph.D in Mechanical Engineering of Tongji University, jointed the Department of Robotics Engineering of Qilu University of Technology (Shandong Academy of Sciences) from Oct. 2023, and built the computer vision for robot automation laboratory (CV4RA lab.). He has published more than 30 papers in SCI journals and robotics academic conferences, including IEEE TRANSACTIONS journals, CVPR, IROS. He achieved the Best Paper Finalist Award at the “2019 IEEE ROBIO Conference” (Top 1.5%). He was awarded the “Outstanding Graduate of Tongji University” in 2023 (Top 2%). He currently serves as a reviewer for several TOP Journals and Conferences (i.e., IEEE-TPAMI, IEEE-TII, IEEE-T-ITS, IEEE-RAL, CVPR, IJCAI, ICRA, IROS, AAAI …). His current research covers localization and navigation for intelligent unmanned systems (including robots, autonomous vehicles, UAVs, etc.).
📣 We welcome outstanding and self-motivating undergraduate students to participate in subject competitions, and to jointly carry out research on cutting-edge topics. We also welcome outstanding postgraduate students from both inside and outside the school to collaborate on AI & Robotic research.
Research Topics
- Computer Vision
- Visual /Cross-modal Place Recognition
- AI security
- Embodied Intelligence
News
 Our paper “Hybrid State Space Modeling for Sequence-based Robot Localization Under Challenging Environments” has been accepted by《IEEE Transactions on Automation Science and Engineering》 ! well done👏👏👏!!!
Our paper “Hybrid State Space Modeling for Sequence-based Robot Localization Under Challenging Environments” has been accepted by《IEEE Transactions on Automation Science and Engineering》 ! well done👏👏👏!!!- Our paper “A2GC: Asymmetric Aggregation with Geometric Constraints for Locally Aggregated Descriptors” has been accepted by《The 2026 IEEE/CVF Conference on Computer Vision and Pattern Recognition》 ! well done👏👏👏!!!
- Our paper “Vehicle-SceneInteraction: A Text-Driven 3-D Lidar Place Recognition Method for Autonomous Driving” has been accepted by《IEEE Transactions on Intelligent Transportation Systems》 ! well done👏👏👏!!!
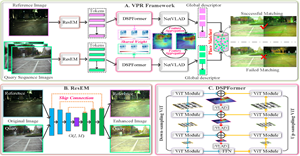
- Our paper “Seeing Through the Rain: Multi-Stage Attention with Depth-Guided Restoration for Robust Localization” has been accepted by《IEEE Transactions on Industrial Informatics》 ! well done👏👏👏!!!
Team
coming soon …
Publications
(2026 published papers)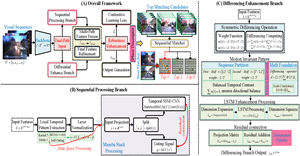
Hybrid State Space Modeling for Sequence-based Robot Localization Under Challenging Environments, IEEE Transactions on Automation Science and Engineering (TASE).
![]()
Zhenyu Li*, Tianyi Shang
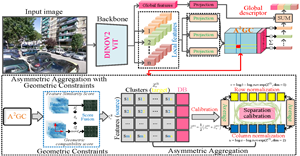
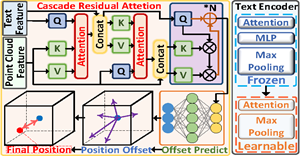
A2GC: Asymmetric Aggregation with Geometric Constraints for Locally Aggregated Descriptors, The 2026 IEEE/CVF Conference on Computer Vision and Pattern Recognition (CVPR).
![]()
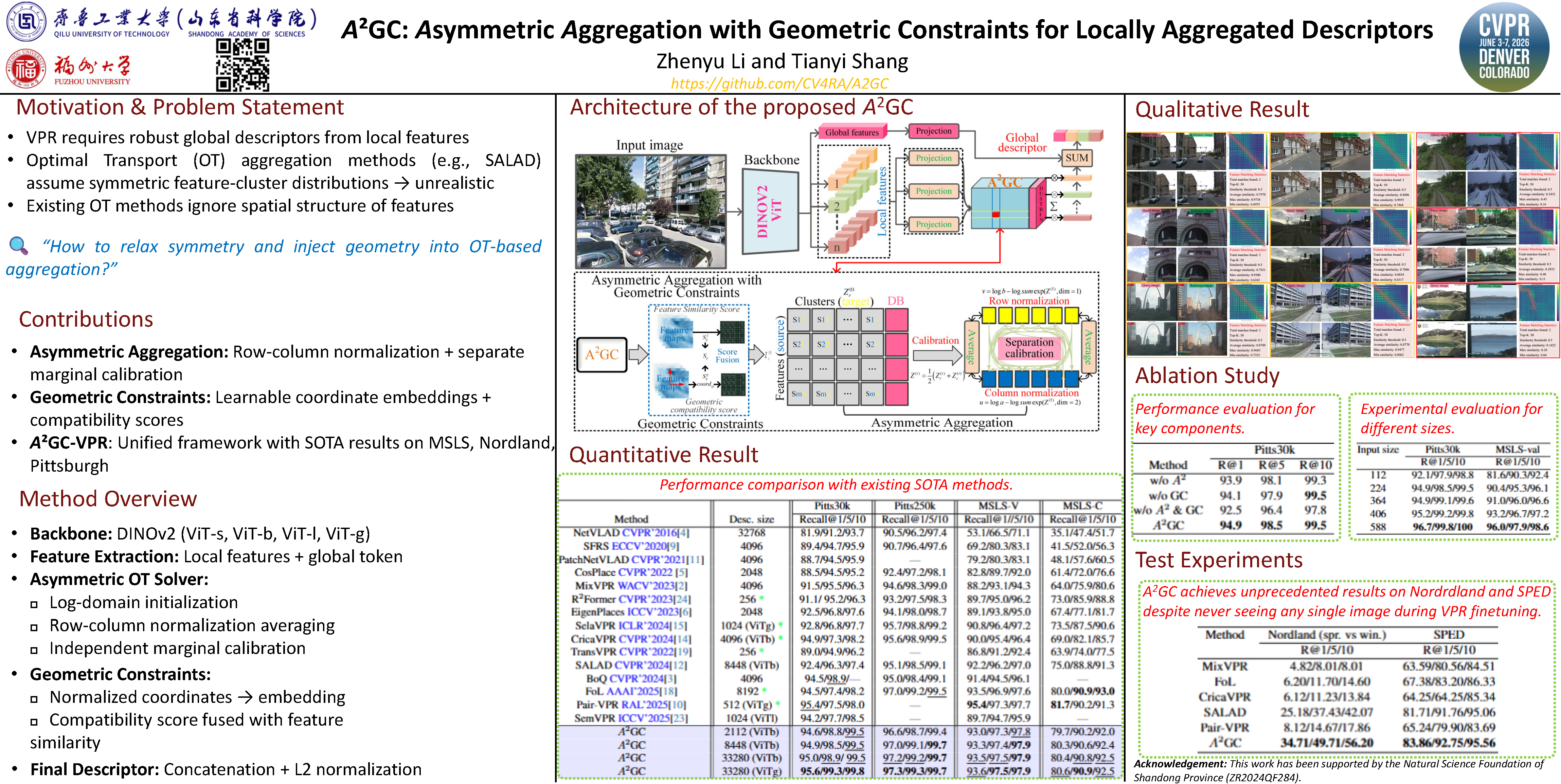
Zhenyu Li*, Tianyi Shang
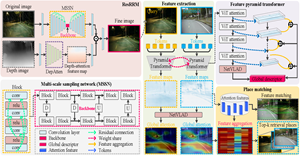
Seeing Through the Rain: Multistage Attention With Depth-Guided Restoration for Robust Localization, IEEE Transactions on Industrial Informatics (TII).
![]()
Zhenyu Li*, Tianyi Shang, Jinwei Qiao, Pengbo Liu, Zhaojun Deng
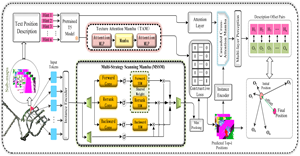
Vehicle-Scene Interaction: A Text-Driven 3-D Lidar Place Recognition Method for Autonomous Driving, IEEE Transactions on Intelligent Transportation Systems (TITS).
![]()
Tianyi Shang, Zhenyu Li*, Pengjie Xu, Zhaojun Deng
MambaPlace: Text-to-Point-Cloud Cross-Modal Place Recognition with Attention Mamba Mechanisms, 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
![]()
Tianyi Shang, Zhenyu Li*, Pengjie Xu, Jinwei Qiao

Bridging Text and Vision: A Multi-View Text-Vision Registration Approach for Cross-Modal Place Recognition, 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS).
![]()
Tianyi Shang, Zhenyu Li*, Pengjie Xu, Jinwei Qiao, Gang Chen, Zihan Ruan, Weijun Hu

Quadruplet-attention transformer for scale-invariant robot placerecognition, Expert Systems with Applications (ESWA).
![]()
Zhenyu Li*, Pengjie Xu
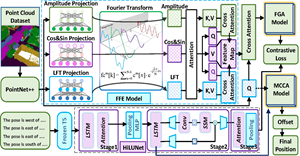
FourierPlace: A Vision-Language Localization Framework Based on Frequency Domain Representations, IEEE Robotics and Automation Letters (RAL).
![]()
Tianyi Shang, Zhenyu Li*, Shuaishuai Lu, Pengjie Xu
Place Recognition Meet Multiple Modalitie: A Comprehensive Review, Current Challenges and Future Directions, Artificial Intelligence Review.
![]()
Zhenyu Li*, Tianyi Shang, Pengjie Xu, Zhaojun Deng

Multi-Modal Attention Perception for Intelligent Vehicle Navigation using Deep Reinforcement Learning, IEEE Transactions on Intelligent Transportation Systems (TITS).
![]()
Zhenyu Li*, Tianyi Shang, Pengjie Xu
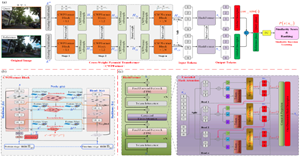
CWPFormer: Towards High-performance Visual Place Recognition for Robot with Cross-weight Attention Learning, IEEE Transactions on Artificial Intelligence (TAI).
![]()
Zhenyu Li*, Pengjie Xu, Tianyi Shang
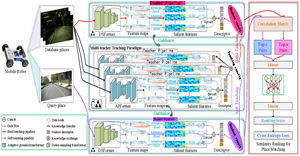
Feature-Level Knowledge Distillation for Place Recognition Based on Soft-Hard Labels Teaching Paradigm, IEEE Transactions on Intelligent Transportation Systems (TITS).
![]()
Zhenyu Li*, Pengjie Xu, henbiao Dong, Ruirui Zhang, Zhaojun Deng
Toward robust visual place recognition for mobile robots with an end-to-end dark-enhanced net, IEEE Transactions on Industrial Informatics (TII).
![]()
Zhenyu Li*, Pengjie Xu, henbiao Dong, Ruirui Zhang, Zhaojun Deng